


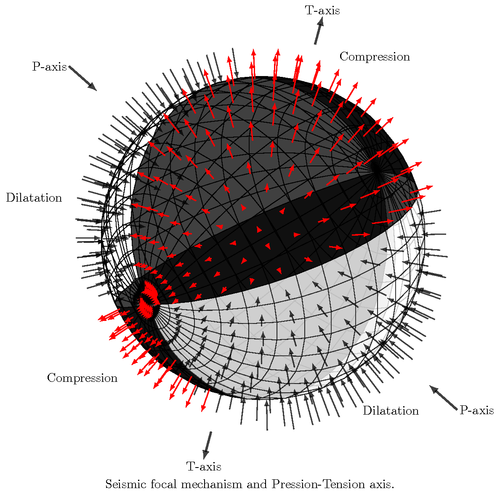
Adaptation for LaTeX of a figure proposed in P. Shearer's book 'Introduction to Seismology'.
It shows the focal sphere with the fault plane and auxiliary plane (which can not be discriminate), limiting compression and dilatation quadrants, the first movement of the rock through the sphere, and the Pression and Tension axis.
The figure is based on the sphere drawing's code proposed by J. Dumas in is book Tikz pour l'impatient, available online.
Edit and compile if you like:
% Title: Seismic focal mechanism in 3D view.
% Author: Cyril Langlois
% Source: Jacques Duma
% Site: http://math.et.info.free.fr/TikZ/index.html
%
% Adaptation for LaTeX of a figure proposed in P. Shearer's book 'Introduction
% to Seismology'.
%
% It shows the focal sphere with the fault plane and auxiliary plane (which can
% not be discriminate), limiting compression and dilatation quadrants, the first
% movement of the rock through the sphere, and the Pression and Tension axis.
%
% The figure is based on the sphere drawing's code proposed by J. Dumas in is
% book 'Tikz pour l'impatient', available online.
\documentclass[11pt]{article}
\usepackage{tikz}
\usepackage{tikz-3dplot}
\usepackage[active,tightpage]{preview}
\PreviewEnvironment{tikzpicture}
\setlength\PreviewBorder{5pt}%
%%%%%%%%%%%
%% helper macros
%: Styles for XYZ-Coordinate Systems
%: isometric South West : X , South East : Y , North : Z
\tikzset{isometricXYZ/.style={x={(-0.866cm,-0.5cm)}, y={(0.866cm,-0.5cm)}, z={(0cm,1cm)}}}
%: isometric South West : Z , South East : X , North : Y
\tikzset{isometricZXY/.style={x={(0.866cm,-0.5cm)}, y={(0cm,1cm)}, z={(-0.866cm,-0.5cm)}}}
%: isometric South West : Y , South East : Z , North : X
\tikzset{isometricYZX/.style={x={(0cm,1cm)}, y={(-0.866cm,-0.5cm)}, z={(0.866cm,-0.5cm)}}}
%% document-wide tikz options and styles
\begin{document}
\begin{tikzpicture} [scale=4, isometricZXY, line join=round,
opacity=.75, text opacity=1.0,%
>=latex,
inner sep=0pt,%
outer sep=2pt,%
]
\def\h{5}
\newcommand{\quadrant}[2]{
\foreach \t in {#1} \foreach \f in {175,165,...,5}
\draw [fill=#2]
({sin(\f - \h)*cos(\t - \h)}, {sin(\f - \h)*sin(\t - \h)}, {cos(\f - \h)})
-- ({sin(\f - \h)*cos(\t + \h)}, {sin(\f - \h)*sin(\t + \h)}, {cos(\f - \h)})
-- ({sin(\f + \h)*cos(\t + \h)}, {sin(\f + \h)*sin(\t + \h)}, {cos(\f + \h)})
-- ({sin(\f + \h)*cos(\t - \h)}, {sin(\f + \h)*sin(\t - \h)}, {cos(\f + \h)})
-- cycle;
}
%Quadrants
\quadrant{220,230,...,300}{black}
\quadrant{-60,-50,...,20}{white}
\quadrant{30,40,...,120}{black}
\quadrant{130,140,...,210}{none}
%Movement arrows
\foreach \t in {225,235,...,295}
\foreach \f in {50,40,...,0}
\draw [red, opacity=1.0, ->, thick]
({sin(\f - \h)*cos(\t - \h)}, {sin(\f - \h)*sin(\t - \h)}, {cos(\f - \h)})
-- ({(1 + 0.2*cos(90 - \f))*sin(\f - \h)*cos(\t - \h)},
{(1 + 0.2*cos(90 - \f))*sin(\f - \h)*sin(\t - \h)},
{(1 + 0.2*cos(90 - \f))*cos(\f - \h)});
\foreach \t in {125,135,...,205}
\foreach \f in {110,100,...,0}
\draw [black, ->, thick]
({(1 + 0.2*cos(90 - \f))*sin(\f - \h)*cos(\t - \h)},
{(1 + 0.2*cos(90 - \f))*sin(\f - \h)*sin(\t - \h)},
{(1 + 0.2*cos(90 - \f))*cos(\f - \h)})
-- ({sin(\f - \h)*cos(\t - \h)},{sin(\f - \h)*sin(\t - \h)},{cos(\f - \h)});
\foreach \t in {35,45,...,115}
\foreach \f in {130,120,...,0}
\draw [red, opacity=1.0 ,->, thick]
({sin(\f - \h)*cos(\t - \h)}, {sin(\f - \h)*sin(\t - \h)}, {cos(\f - \h)})
-- ({(1 + 0.2*cos(90 - \f))*sin(\f - \h)*cos(\t - \h)},
{(1 + 0.2*cos(90 - \f))*sin(\f - \h)*sin(\t - \h)},
{(1 + 0.2*cos(90 - \f))*cos(\f - \h)});
\foreach \t in {-55,-45,...,25}
\foreach \f in {130,120,...,0}
\draw [black, ->, thick]
({(1 + 0.2*cos(90 - \f))*sin(\f - \h)*cos(\t - \h)},
{(1 + 0.2*cos(90 - \f))*sin(\f - \h)*sin(\t - \h)},
{(1 + 0.2*cos(90 - \f))*cos(\f - \h)})
-- ({sin(\f - \h)*cos(\t - \h)},{sin(\f - \h)*sin(\t - \h)},{cos(\f - \h)});
%Annotations
\path ({1.5*sin(100)*cos(75)}, {1.5*sin(100)*sin(75)}, {1.5*cos(100)}) node [right] {Compression};
\path ({1.5*sin(70)*cos(-15)}, {1.5*sin(70)*sin(-15)}, {1.5*cos(70)}) node [right] {Dilatation};
\path ({1.25*sin(50)*cos(165)},{1.25*sin(50)*sin(165)},{1.25*cos(50)}) node [left] {Dilatation};
\path ({1.25*sin(30)*cos(255)},{1.25*sin(30)*sin(255)},{1.25*cos(30)}) node [left] {Compression};
%P and T axis
\begin{scope}[ultra thick]
\draw[->] ({1.75*sin(90)*cos(75)}, {1.75*sin(90)*sin(75)}, {1.75*cos(90)})
-- ({2*sin(90)*cos(75)},{2*sin(90)*sin(75)},{2*cos(90)}) node [above] {T-axis};
\draw[->] ({1.75*sin(90)*cos(255)},{1.75*sin(90)*sin(255)},{1.75*cos(90)})
-- ({2*sin(90)*cos(255)},{2*sin(90)*sin(255)},{2*cos(90)}) node [below] {T-axis};
\draw[<-] ({1.5*sin(90)*cos(-15)}, {1.5*sin(90)*sin(-15)}, {1.5*cos(90)})
-- ({1.75*sin(90)*cos(-15)},{1.75*sin(90)*sin(-15)},{1.75*cos(90)}) node [right] {P-axis};
\draw[<-] ({1.5*sin(90)*cos(165)}, {1.5*sin(90)*sin(165)}, {1.5*cos(90)})
-- ({1.75*sin(90)*cos(165)},{1.75*sin(90)*sin(165)},{1.75*cos(90)}) node [left] {P-axis};
\end{scope}
% Label
\node [anchor=north, yshift=-2mm] at (current bounding box.south)
{Seismic focal mechanism and Pression-Tension axis.};
\end{tikzpicture}
\end{document}
Click to download: seismic-focal-mechanism-in-3d-view.tex • seismic-focal-mechanism-in-3d-view.pdf
Open in Overleaf: seismic-focal-mechanism-in-3d-view.tex