


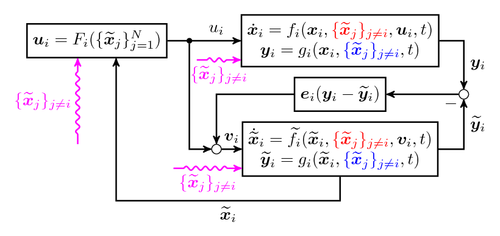
An example of an observer with a feedback loop. By using the matrix tikzlibrary it is shown how to easily place and link the nodes appropriately in order to create very complex block diagrams. Additionally, this example shows how to use line decorations as well as how to use an offset for arrow placement.
Edit and compile if you like:
% Observer/Estimator
% Author: Dominik Haumann
\documentclass[landscape,a5paper,11pt]{article}
\usepackage[utf8x]{inputenc} % utf8 encoding
\usepackage[T1]{fontenc} % use T1 fonts
\usepackage{amsmath} % nice math symbols
\usepackage{bm} % bold math
\usepackage{color} % change text color
\usepackage{tikz}
\usepackage[active,tightpage]{preview}
\PreviewEnvironment{tikzpicture}
\setlength\PreviewBorder{5pt}%
\usetikzlibrary{decorations.pathmorphing} % for snake lines
\usetikzlibrary{matrix} % for block alignment
\usetikzlibrary{arrows} % for arrow heads
\usetikzlibrary{calc} % for manimulation of coordinates
% TikZ styles for drawing
\tikzstyle{block} = [draw,rectangle,thick,minimum height=2em,minimum width=2em]
\tikzstyle{sum} = [draw,circle,inner sep=0mm,minimum size=2mm]
\tikzstyle{connector} = [->,thick]
\tikzstyle{line} = [thick]
\tikzstyle{branch} = [circle,inner sep=0pt,minimum size=1mm,fill=black,draw=black]
\tikzstyle{guide} = []
\tikzstyle{snakeline} = [connector, decorate, decoration={pre length=0.2cm,
post length=0.2cm, snake, amplitude=.4mm,
segment length=2mm},thick, magenta, ->]
\renewcommand{\vec}[1]{\ensuremath{\boldsymbol{#1}}} % bold vectors
\def \myneq {\skew{-2}\not =} % \neq alone skews the dash
\begin{document}
\begin{tikzpicture}[scale=1, auto, >=stealth']
\small
% node placement with matrix library: 5x4 array
\matrix[ampersand replacement=\&, row sep=0.2cm, column sep=0.4cm] {
%
\node[block] (F1) {$\vec{u}_i = F_i(\{\widetilde{\vec{x}}_j\}_{j=1}^N)$}; \&
\node[branch] (u1) {}; \&
\&
\node[block] (f1) {$\begin{matrix}
\dot{\vec{x}}_i =
f_i(\vec{x}_i,
\textcolor{red}{\{\widetilde{\vec{x}}_j\}_{j \myneq i}},
\vec{u}_i,
t)\\
\vec{y}_i =
g_i(\vec{x}_i,
\textcolor{blue}{\{\widetilde{\vec{x}}_j\}_{j \myneq i}},
t)
\end{matrix}$}; \& \\
\&
\&
\&
\node[block] (L1) {$\vec{e}_i(\vec{y}_i - \widetilde{\vec{y}}_i)$};\&
\node [sum] (e1) {}; \\
\&
\&
\node[sum] (v1) {}; \&
\node[block] (o1) {$\begin{matrix}
\dot{\widetilde{\vec{x}}}_i =
\widetilde{f}_i(\widetilde{\vec{x}}_i,
\textcolor{red}{\{\widetilde{\vec{x}}_j\}_{j \myneq i}},
\vec{v}_i, t)\\
\widetilde{\vec{y}}_i =
g_i(\widetilde{\vec{x}}_i,
\textcolor{blue}{\{\widetilde{\vec{x}}_j\}_{j \myneq i}},
t)
\end{matrix}$};
\&
\\
\node[guide] (i1) {}; \& \& \& \& \\
};
% now link the nodes
\draw [line] (F1) -- (u1);
\draw [connector] (u1) -- node {$u_i$} (f1);
\draw [connector] (f1) -| node[near end] {$\vec{y}_i$} (e1);
\draw [connector] (e1) -- (L1);
\draw [connector] (L1) -| (v1);
\draw [connector] (v1) -- node {$\vec{v}_i$} (o1);
\draw [connector] (u1) |- (v1);
\draw [connector] (o1) -| node[pos=0.96] {$-$} node [near end, swap]
{$\widetilde{\vec{y}}_i$} (e1);
\draw [connector] (o1.south) -- ++(0,-.5cm) -| node [near start]
{$\widetilde{\vec{x}}_i$} ($(F1.south) + (0.4cm, 0em)$);
% draw the snake lines with offset (using the calc library)
\draw [snakeline] ($(i1) - (0.4cm, -1cm)$) -- node
{$\{\widetilde{\vec{x}}_j\}_{j \myneq i}$} ($(F1.south) - (0.4cm, 0em)$);
\draw [snakeline, swap] ($(v1.east) - (1.0cm, 0.4cm)$) -- node
{$\{\widetilde{\vec{x}}_j\}_{j \myneq i}$} ($(o1.west) - (0cm, 0.4cm)$);
\draw [snakeline, swap] ($(u1.east) + (0.1cm, -0.4cm)$) -- node
{$\{\widetilde{\vec{x}}_j\}_{j \myneq i}$} ($(f1.west) - (0cm, 0.4cm)$);
\end{tikzpicture}
\end{document}
Click to download: observer-estimator.tex • observer-estimator.pdf
Open in Overleaf: observer-estimator.tex