


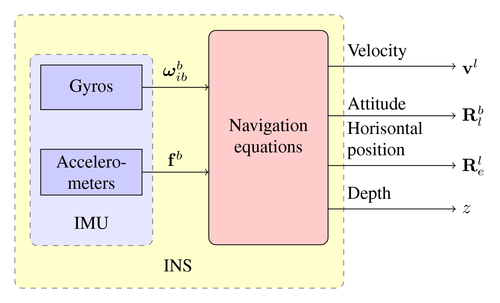
A block diagram of an inertial measurement unit (IMU) combined with navigation equations to form an inertial navigation system (INS). A handful of useful tricks have been used to align blocks and arrows nicely. Hard coding coordinates has been avoided as much as possible.
Edit and compile if you like:
\documentclass{article}
\usepackage{tikz}
\usetikzlibrary{shapes,arrows}
\usepackage{amsmath,bm,times}
\newcommand{\mx}[1]{\mathbf{\bm{#1}}} % Matrix command
\newcommand{\vc}[1]{\mathbf{\bm{#1}}} % Vector command
\begin{document}
\pagestyle{empty}
% We need layers to draw the block diagram
\pgfdeclarelayer{background}
\pgfdeclarelayer{foreground}
\pgfsetlayers{background,main,foreground}
% Define a few styles and constants
\tikzstyle{sensor}=[draw, fill=blue!20, text width=5em,
text centered, minimum height=2.5em]
\tikzstyle{ann} = [above, text width=5em]
\tikzstyle{naveqs} = [sensor, text width=6em, fill=red!20,
minimum height=12em, rounded corners]
\def\blockdist{2.3}
\def\edgedist{2.5}
\begin{tikzpicture}
\node (naveq) [naveqs] {Navigation equations};
% Note the use of \path instead of \node at ... below.
\path (naveq.140)+(-\blockdist,0) node (gyros) [sensor] {Gyros};
\path (naveq.-150)+(-\blockdist,0) node (accel) [sensor] {Accelero-meters};
% Unfortunately we cant use the convenient \path (fromnode) -- (tonode)
% syntax here. This is because TikZ draws the path from the node centers
% and clip the path at the node boundaries. We want horizontal lines, but
% the sensor and naveq blocks aren't aligned horizontally. Instead we use
% the line intersection syntax |- to calculate the correct coordinate
\path [draw, ->] (gyros) -- node [above] {$\vc{\omega}_{ib}^b$}
(naveq.west |- gyros) ;
% We could simply have written (gyros) .. (naveq.140). However, it's
% best to avoid hard coding coordinates
\path [draw, ->] (accel) -- node [above] {$\vc{f}^b$}
(naveq.west |- accel);
\node (IMU) [below of=accel] {IMU};
\path (naveq.south west)+(-0.6,-0.4) node (INS) {INS};
\draw [->] (naveq.50) -- node [ann] {Velocity } + (\edgedist,0)
node[right] {$\vc{v}^l$};
\draw [->] (naveq.20) -- node [ann] {Attitude} + (\edgedist,0)
node[right] { $\mx{R}_l^b$};
\draw [->] (naveq.-25) -- node [ann] {Horisontal position} + (\edgedist,0)
node [right] {$\mx{R}_e^l$};
\draw [->] (naveq.-50) -- node [ann] {Depth} + (\edgedist,0)
node[right] {$z$};
% Now it's time to draw the colored IMU and INS rectangles.
% To draw them behind the blocks we use pgf layers. This way we
% can use the above block coordinates to place the backgrounds
\begin{pgfonlayer}{background}
% Compute a few helper coordinates
\path (gyros.west |- naveq.north)+(-0.5,0.3) node (a) {};
\path (INS.south -| naveq.east)+(+0.3,-0.2) node (b) {};
\path[fill=yellow!20,rounded corners, draw=black!50, dashed]
(a) rectangle (b);
\path (gyros.north west)+(-0.2,0.2) node (a) {};
\path (IMU.south -| gyros.east)+(+0.2,-0.2) node (b) {};
\path[fill=blue!10,rounded corners, draw=black!50, dashed]
(a) rectangle (b);
\end{pgfonlayer}
\end{tikzpicture}
\end{document}Click to download: inertial-navigation-system.tex • inertial-navigation-system.pdf
Open in Overleaf: inertial-navigation-system.tex