")


Edit and compile if you like:
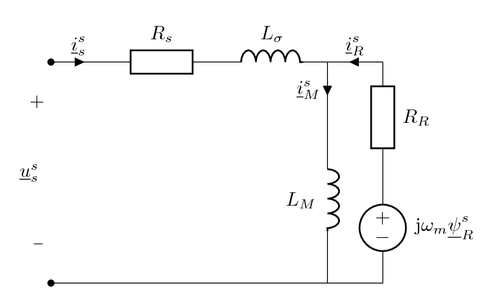
% Dynamic inverse-$\varGamma$-equivalent circuit for an induction machine
% Author: Erno Pentzin (2013)
\documentclass{article}
\usepackage{tikz}
\usepackage[active,tightpage]{preview}
\PreviewEnvironment{tikzpicture}
\setlength\PreviewBorder{10pt}%
\usepackage[europeanresistors,americaninductors]{circuitikz}
\begin{document}
\begin{circuitikz}[american voltages]
\draw
% rotor circuit
(0,0) to [short, *-] (6,0)
to [V, l_=$\mathrm{j}{\omega}_m \underline{\psi}^s_R$] (6,2) % rotor emf
to [R, l_=$R_R$] (6,4) % rotor resistance
to [short, i_=$\underline{i}^s_R$] (5,4) % rotor current
% stator circuit
(0,0) to [open, v^>=$\underline{u}^s_s$] (0,4) % stator voltage
to [short, *- ,i=$\underline{i}^s_s$] (1,4) % stator current
to [R, l=$R_s$] (3,4) % stator resistance
to [L, l=$L_{\sigma}$] (5,4) % leakage inductance
to [short, i_=$\underline{i}^s_M$] (5,3) % magnetizing current
to [L, l_=$L_M$] (5,0); % magnetizing inductance
\end{circuitikz}
\end{document}Click to download: induction-machine.tex • induction-machine.pdf
Open in Overleaf: induction-machine.tex